A hovering underwater robot used the waggle dance borrowed from the honey bee to try to tell human observers the location of items hidden around Boston. The humans did not understand.
Bees communicate the location of good sources of nectar using the waggle dance. Inside the hive, the bee who has found that good source waggle-crawls a little stint and then arcs round back to where it began the waggle and does it again, alternating which way it turns for the return leg so that ultimately the dance forms a rough figure-eight shape with the waggly bit in the middle. The direction of the source is communicated by the angle of the waggle bit relative to the hive: that is the angle to fly in relation to the position of the sun. The distance to the source of nectar is coded in the duration of the waggle bit: roughly, each one second of waggling means fly one kilometer.
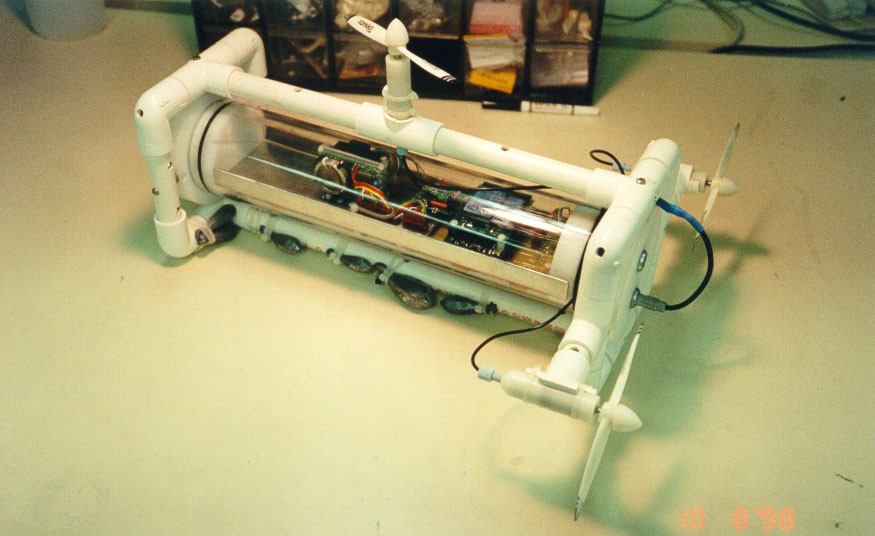
I had designed the robot for research projects about swarming underwater robots. For that research, I had written a set of code and behaviours that allowed it to address the practical applications that that research was focused on. For the Wet Waggle performance, I had written another set of high-level code that I thought of as giving the robot a different fundamental essense—but still one that seemed in some sort of way to fit its body.
The robot performed its waggle dance in a small glass-sided tank of water in a lab in Cambridge, Massachusetts. Most of the time, no one was even in the room watching.